- HOME
- WiBotic製品紹介
- WiBotic ワイヤレス給電・充電管理ソフトウェア

WiBotic充電管理ソフトウェアとは
WiBotic充電管理ソフトウェアとは、充電ステータス、機器位置、バッテリーの健康状態をリアルタイムで可視化する機能です。
「WiBotic充電管理ソフトウェア」は、充電ステータス、機器位置、バッテリー状態をリアルタイムで可視化します。これにより、属人的な勘に頼らず、正確なデータに基づいた充電計画や予防保全が可能です。
従来のAGV/AMRやロボット運用では、「充電のボトルネック」が稼働率低下の原因でした。しかし、ナブテスコのソリューションは、個々の機器を最適化する「Control Panel」と、数千台のロボットを一元管理する「Commander」で、この課題を解決し、自動化設備のポテンシャルを最大限に引き出します。
ソフトウェア機能紹介
2つのソフトウェア機能紹介をします。
ブラウザベースの充電管理UI「WiBotic CONTROL
PANEL」と複数台のフリート管理ソフトウェア「WiBotic COMMANDER」
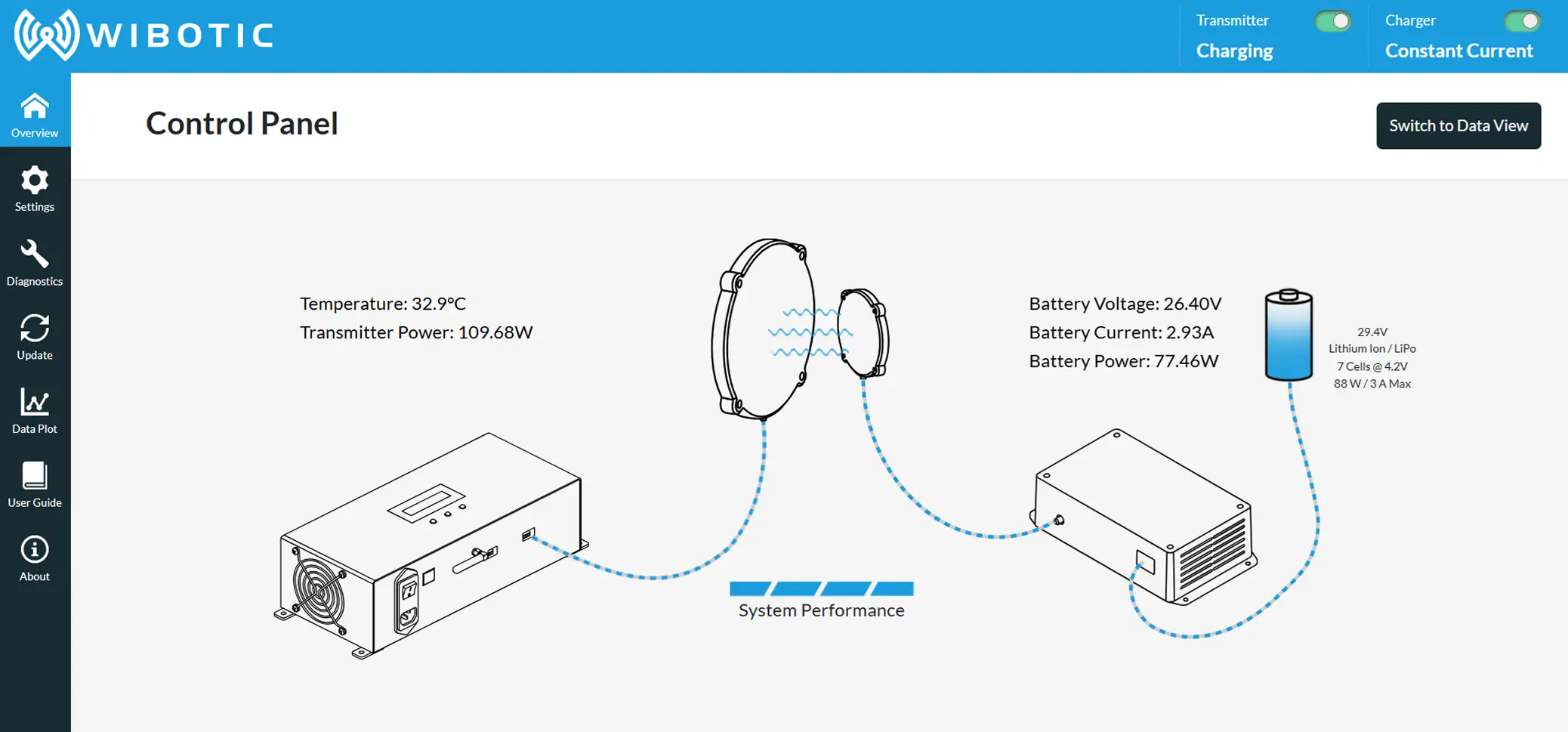
ブラウザベースの充電管理UI「WiBotic CONTROL PANEL」
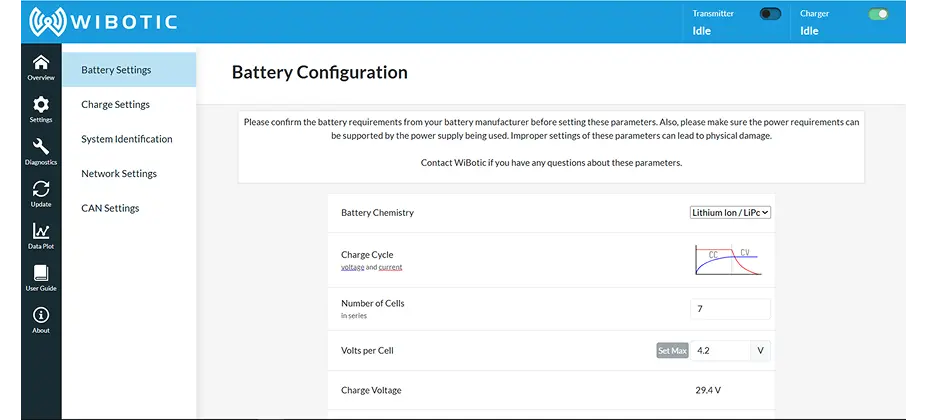
給電・充電条件の設定
バッテリーの種類を選択し、バッテリーへの充電条件(電流値)を設定。
設定は随時変更が可能
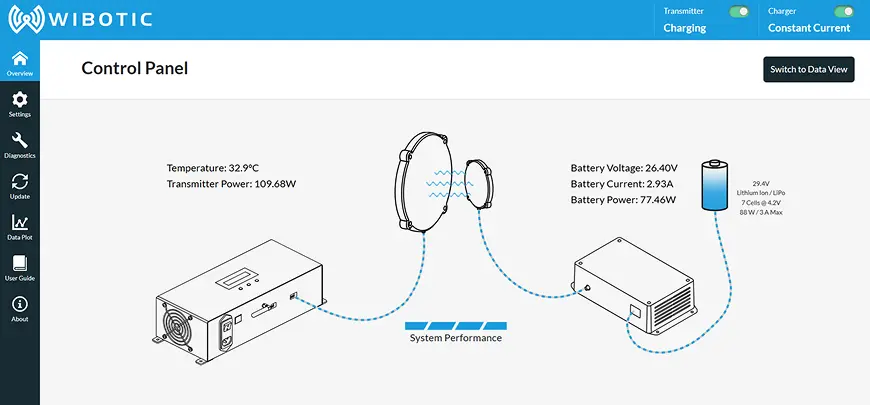
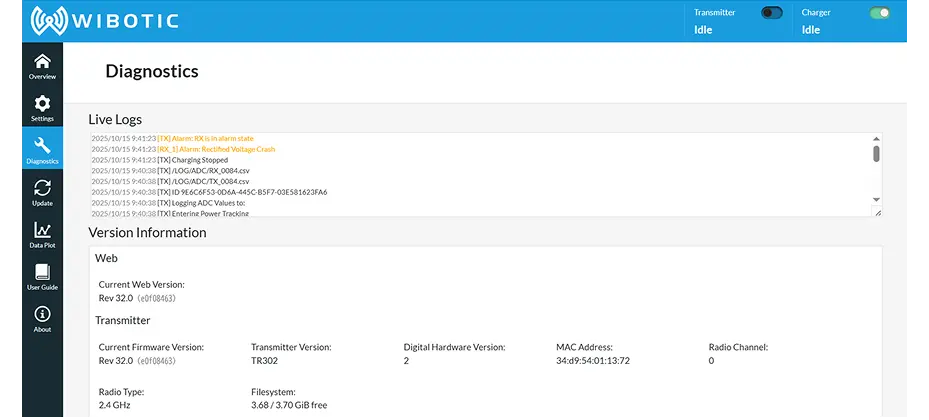
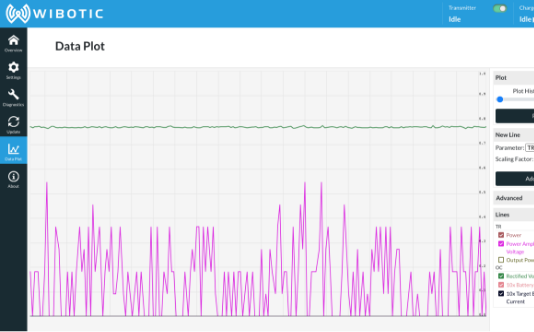
充電モニタリング
画面上に送電器、受電器、バッテリー等の情報が表示され、状態を視覚的・直感的に把握することが可能。
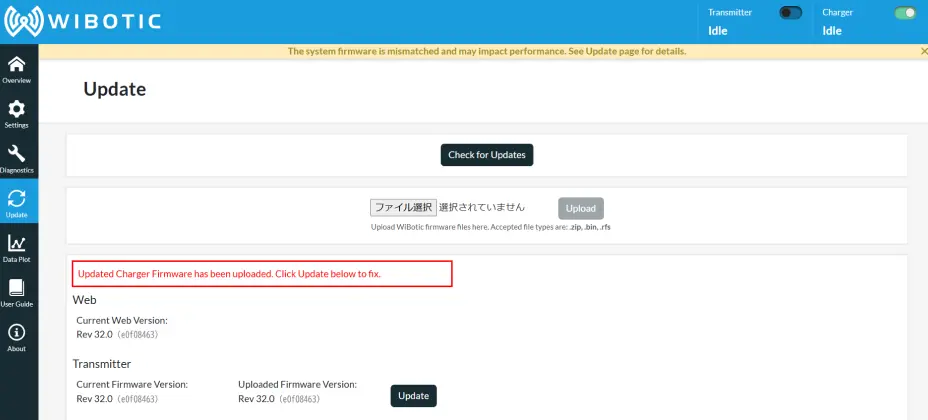
ファームウェアの更新
Control Panelの機能はアップデートにより随時更新・拡張されていきます。
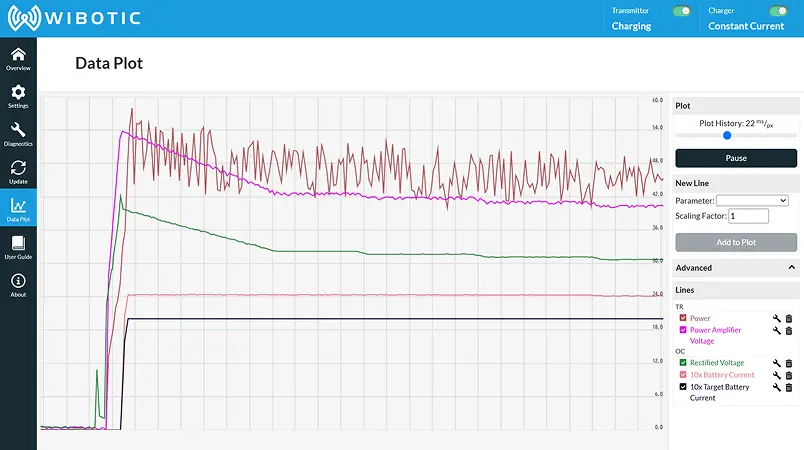
ログ取得と保存
充電の状態をリアルタイムで取得し、記録データをダウンロード可能。
100ログまで保存可能。
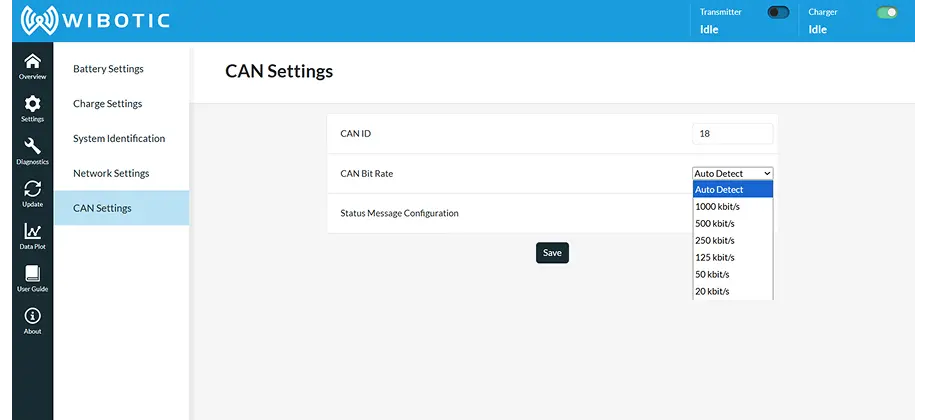
API連携
ロボット側とCAN通信によるAPI連携を通じて、様々な制御をロボット側から行うことが可能。
複数台のフリート管理ソフトウェア(WiBotic COMMANDER)

機器位置の表示と状態把握
全ての充電ステーションの位置とステータスを可視化
ログ取得と保存
充電の状態をリアルタイムで取得し、記録されたデータをダウンロード可能
データ容量は無制限に保存されます。
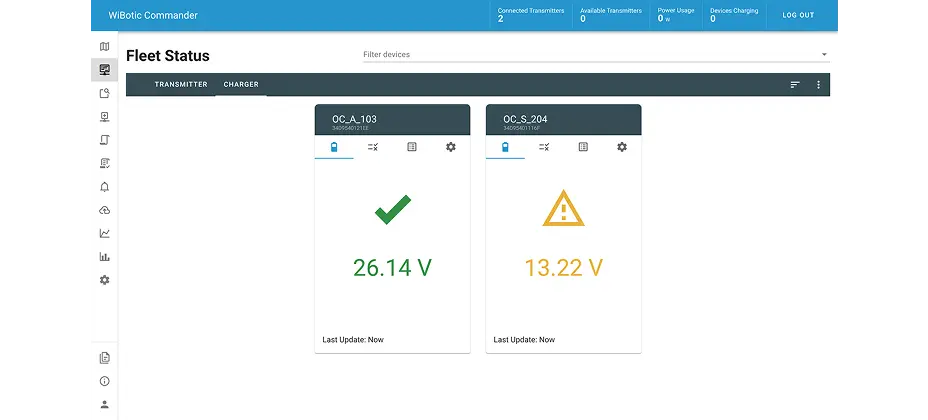
通知機能
バッテリーの電圧等でのトリガーを設定することで通知ことが可能。問題が発生した場合に迅速に対応することが出来ます。
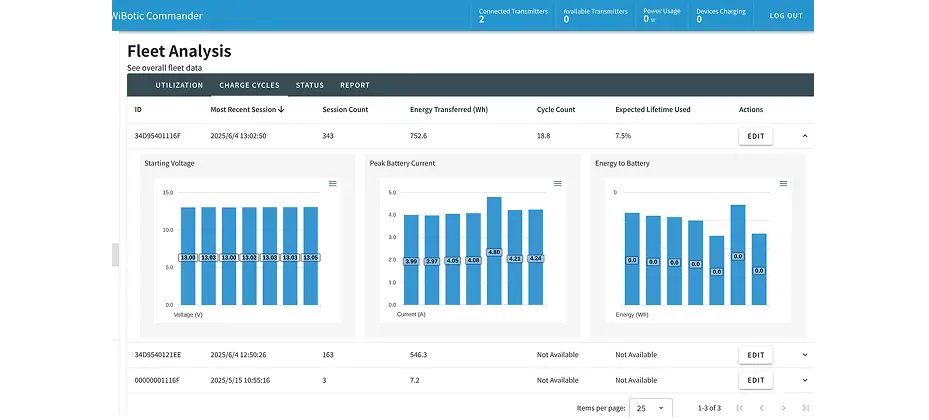
バッテリー寿命管理
各充電ユニットに接続されたバッテリーの充電サイクル数を把握することで、
バッテリーの劣化状況等の把握が可能。
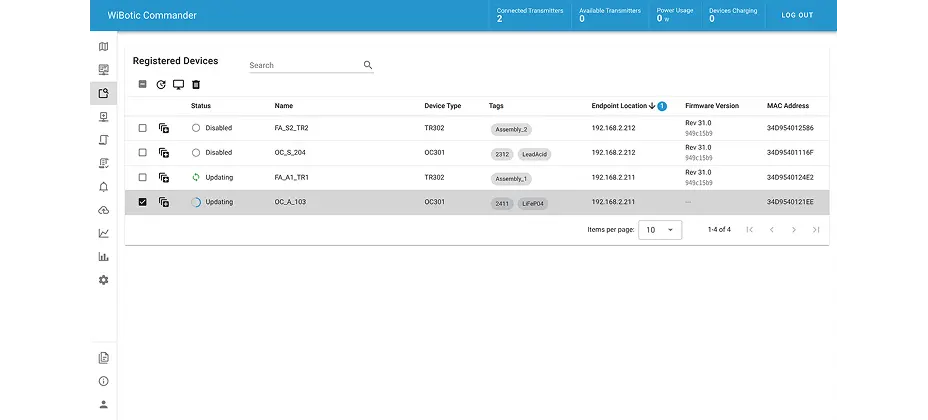
ファームウェア一括更新
全ての送電ユニット、オンボードチャージャーのファームウェアを一括で更新することが可能。
メリット比較
2つのソフトウェアの導入後のメリットを紹介します。
ブラウザベースの充電管理UI「WiBotic
CONTROL PANEL」と複数台のフリート管理ソフトウェア「WiBotic COMMANDER」
| 項目 | ブラウザベースの充電管理UI ※無償(controlPanel) | 複数台のフリート管理 ※オプション(Commander) |
|---|---|---|
| 特徴 | ブラウザから充電条件の設定やステータスの視覚化が可能で、手動での設定・確認が軽減されます。 | (WiBoticのデータ管理)により、フリート全体の稼働データに基づいた充電パターンの最適化が可能となります。 |
| バッテリーコスト | リアルタイムの充電状況を視覚化し、手動で充電条件を調整・最適化する際の判断材料を提供することで、バッテリー寿命最大化を支援します。 | 完全自動・遠隔管理に移行し、最適な充電でバッテリー寿命を最大化することで、交換頻度とコストを大幅に削減します。 |
| 稼働率のムラ | 各ユニットのステータスを即座に確認できるため、充電忘れや異常の早期発見と手動による迅速な対応を支援します。 | フリート全体の状況をリアルタイムで把握し、問題に迅速対応できるため、安定稼働と生産性向上に貢献します。 |
| システム更新 | ソフトウェアを通じてファームウェアのバージョン確認が容易に行え、手動での更新作業の準備を支援します。 | ファームウェアの一括更新機能により、全てのユニットのファームウェアを一度に更新でき、管理工数が大幅に削減されます。 |
実現できること
統合ソフトウェア「WiBotic CONTROL PANEL」と「WiBotic COMMANDER」で実現できることを3つ紹介します。
充電状況を遠隔確認
個別機器の充電プロファイルを
「遠隔・柔軟に最適化」
(WiBotic
CONTROL PANEL)
ブラウザベースのインターフェースで、個々の機器の給電・充電パラメータを細かく設定可能。充電電流、電圧の可視化はもちろん、無線でファームウェア更新も実行できるため、現場に足を運ぶことなく、常に最適な状態で機器を稼働させます。

生産性向上
機器のバッテリー種類や、次に行うタスクに応じて充電速度を調整し、現場を止めずに最高の効率で充電を完了させます。
バッテリー長寿命化
過熱や過充電を防ぐために充電設定を細かくコントロールすることで、バッテリーの熱ストレスを軽減し、交換頻度とコストを削減します。
手間いらずの管理
無線通信を通じてファームウェアのアップデートも実行できるため、現場での手動対応作業が一切不要です。
リアルタイム監視
数台~数千台規模の
自動搬送機/
ロボットをフロアマップで
リアルタイム監視と
給電履歴の管理
(WiBotic COMMANDER)
工場や倉庫のフロアマップ上で、フリート全体の機器位置と充電ステータスをリアルタイムで追跡。さらに、給電・充電の全履歴をログとして保存し、データに基づいた運用改善を可能にし、属人化しがちな充電管理から脱却できます。

リアルタイム履歴
工場や倉庫のフロアマップ上で、全AGV/AMRの正確な位置情報と充電ステータスをリアルタイムで可視化します。
データに基づく改善
膨大な給電・充電の履歴ログを自動で取得・保存します。このログデータから、充電効率の低い時間帯や、特定の充電ステーションにおけるボトルネックを特定し、ロボット全体の運用計画を最適化できます。
拡張性
1台のロボットから数千台まで、機器が増えるに従って柔軟に対応できるスケーラビリティを備えています。
故障を未然に防止
バッテリー劣化を予測し
「稼働損失を防止」
(CONTROL PANEL/COMMANDERの連携)
バッテリーの「健康状態(SoH)」を常時モニタリングし、異常や急激な性能低下の兆候を早期に検知します。感覚に頼らず、データに基づいた予防保全と計画的な交換を可能にし、突然のダウンタイムを防ぎ、機器の長寿命化に貢献します。

正確な状態把握
接触式充電で起こりがちな「接触不良による充電不足」などの曖昧さを排除し、正確なバッテリー寿命データを提供します。
計画的な交換
SoHの低下傾向をデータで把握できるため、突然のバッテリー故障による緊急停止を防ぎ、計画的な交換スケジュールを立てることが可能になります。
安全性強化
劣化が激しいバッテリーを早期に発見し交換することで、安全性のリスクを最小限に抑えます。
WiBotic ワイヤレス給電・充電システム機器の用途

AGV/AMR/FA用途
- 工場・倉庫での 運搬の完全自動化
- 工場・倉庫間での
運搬の完全自動化 - 工場や様々な現場での
稼働装置の配線レス化

ドローン用途
- 監視・点検・警備
- スマート農業(農薬散布)
- スマート物流

その他用途
- 宇宙用途
- 配膳・宅配等の
サービスロボット - 水中用途
- ショッピングカート
- 電動キックボード、レンタルサイクル、電動バイク

共通
- WiBotic CONTROL PANEL
- WiBotic COMMANDER
WiBotic ワイヤレス給電・充電管理ソフトウェアのよくある質問
充電設定、充電状態モニタリングのパソコン表示画面を顧客がカスタマイズすることは可能か?
当社のシステムAPIはオープンであり、誰でもAPIを利用して独自の表示画面を開発することが可能です。
ただし、ユーザーインターフェース(以下UI)はオープンソースではないので、UIを変更することはできません。
一つのトランスミッター(+送電アンテナ)から、複数の受電アンテナに同時に給電可能か?
現在、ワイヤレス充電・給電システムは基本的に送電アンテナと受電アンテナが1対1のソリューションです。
1台の送電アンテナから複数の受電アンテナへ同時に充電することはできません。
現在、このような機能を追加する予定は御座いませんが、より効率的な充電・給電システムの実現のため、お客様の課題を一緒に検討することは可能です。
ソフトウェア管理画面は日本語対応できます?
現在ソフトウェアについては全て英語表記ですが、製品サポートはナブテスコで支援しておりますので日本語にて支援可能です。
将来的にはソフトウェアも日本語版に対応できるように改良予定になります。
製品一覧


WiBotic ワイヤレス給電・充電システムについて詳しく知りたい方はこちら
ワイヤレス給電・充電システムをご検討の方へ
WiBotic ワイヤレス給電・充電システムに関するご相談は、
お気軽にお問い合わせください。
軽量・コンパクト・安全なワイヤレス給電・充電システムをメリットのある価格設定で導入できます。
製品の詳細、カスタマイズ、費用の詳細、お見積りはお気軽にお問い合わせください。
~お電話でのお問い合わせはこちら~
9:30~17:00(土日・祝日除く)
